




2015 年《碟中谍 5:神秘国度》有一段让人肾上腺素飙升的追逐戏:摩洛哥的盘山公路上,阿汤哥饰演的伊森·亨特骑着一辆摩托车,长发在风中狂舞,以接近100英里/小时(约160公里/小时)的速度在车流中左右穿梭。身后是紧追不舍的反派,前方是不断迎面驶来的车辆——他侧身压过一个弯道,车身几乎擦着地面呼啸而过。

当我们隔着屏幕感叹屏幕前“骑士”的飒爽英姿的时候,心里大概都会冒出两个问题:这种“贴地飞行”是怎么实现的?摩托车到底是怎么稳住这么高的速度的?
要回答这个问题,我们得走进两个完全不同的世界:一个是让摩托车在弯道里稳如磐石的压弯平衡艺术;另一个,是能让它在直道上瞬间失控的死亡摇摆噩梦。前者是物理定律在“听话”时的优雅表演,后者是同一个系统“发疯”时的恐怖失控——它们就像同一枚硬币的两面,共同揭示着摩托车在极限速度下的全部秘密。
压弯与死亡摇摆,一个代表了物理学的稳态美学,一个揭示了复杂系统的失稳临界。它们共同构成了摩托车运动最核心的动力学命题,让我们看到物理规律如何同时支配着极致的控制与突然的崩溃。

图片来源丨https://www.motogp.com/
第一部分:压弯的平衡艺术
摩托车高速过弯时,往往不通过转动车把实现转向,而是通过车手朝向弯心侧挂,带动着车,以一个极度倾斜的角度实现过弯。
1
观众视角:向心力的作用
对于赛场上的观众来说(处于惯性参考系),摩托车若要沿着半径为r的弯道以速度v行驶,必须获得一个指向弯心的向心力,其大小为

然而,若车手和摩托车完全直立,从受力平衡的角度,如果轮胎上突然感受到一个指向弯心的摩擦力来充当向心力,毫无疑问,我们的车手和车会立即绕着轮胎与地面的接触点发生翻转。
2
骑手视角:“人车合一”对抗“离心力”
对于车手(处于随车身一同旋转的非惯性参考系),则可以很自然地感受到力矩平衡的优美之处。他感觉到的不是“被拉向弯心”,而是被一股强大的力量甩向弯道外侧。为了在这个旋转视角下仍能使用牛顿定律,我们在非惯性系中引入了“离心惯性力”,其大小仍为

在车手的感官世界中,他仿佛在平衡两个力:实际上,以车作为参考系,车手的身体内挂,膝盖外探,是为了保持一个精妙的力矩平衡。
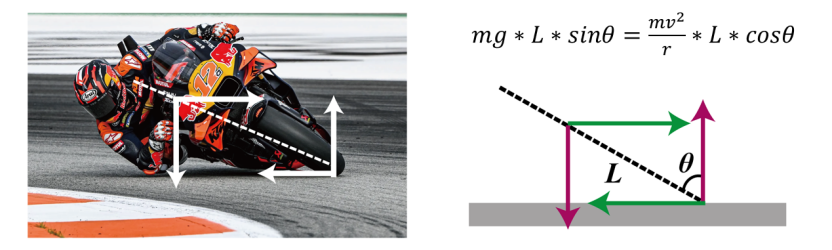
·倾倒力矩:当车身倾斜角度为θ 时,重力和轮胎与地面的接触点并不在一条直线,而是偏出了一段距离。重力(mg)会绕接地点产生一个使车辆继续向外倾倒的力矩,其大小与倾角正弦值(sinθ)成正比。倾角越大,这个“翻倒你”的力矩就越大。
·扶正力矩:同时,提供向心力的轮胎侧向摩擦力,作用在轮胎接地点,方向指向弯心。这个力会绕车辆重心产生一个抵抗倾倒的力矩,即扶正力矩。其大小与向心力(与速度平方成正比)和重心高度有关。
稳定过弯的瞬时状态,正是这个“倾倒力矩”与“扶正力矩”达到大小相等、方向相反的时刻。
此时根据力矩平衡(见下图公式)可以得到理想过弯倾斜角公式

它不仅是力平衡的结果,更是这两个关键力矩平衡的数学表达。车手在弯道中微调油门(改变速度v,从而改变向心力和扶正力矩)或身体姿态(身体内挂、膝盖探出),本质上就是在动态调节这一力矩平衡。
图片来源:https://www.motogp.com
第二部分:死亡摇摆的噩梦
——稳定系统的崩潰
如果说压弯是精心维持的平衡态,那么死亡摇摆(Death Wobble)便是平衡被打破后,系统坠入失控深渊的动力学灾难。它的分析,不再依赖于参考系的转换,而是一场与能量和振动的战争。

图片来源:Longest death wobble recorded? I think it’s time for a steering damper! @anrsix on socials
1
现象:从细微颤动到剧烈狂摆
在高速直线行驶中,前轮可能因路面颠簸或侧风等微小扰动,开始轻微地左右摆动。在正常情况下,这种摆动会因摩擦而迅速衰减。但在特定条件下,摆动不仅不消失,反而在几秒内振幅急剧增大,演变成车把的疯狂剧震,最终彻底摧毁车辆的稳定性。这就是令所有骑手闻之色变的死亡摇摆。
2
机理:负阻尼与自激振荡
死亡摇摆的本质,是一个负阻尼振荡问题。
第一步:前提——稳定的基础(“自回正”效应)
摩托车能稳定直线行驶,关键得益于前轮的“自回正”能力。这主要源于两个设计:
1.前倾角:摩托车前叉是向后倾斜的。
2.拖曳距:前轮接地点位于转向轴延长线与地面交点的后方。
这形成了一个稳定的杠杆:当车头意外左偏时,行驶阻力会作用在拖曳距上,产生一个将车头拉回右边的力矩,如同超市购物车轮自动回正一样。在正常状态下,这个力矩是稳定阻尼,能消除偶然的摆动。
第二步:崩溃——从稳定到失稳(“负阻尼”形成)
当车速超过某个临界值时,上述稳定机制会发生“相位延迟”并失效,甚至反转:
1.触发:一个微小扰动(如压过颠簸、遭遇侧风)使前轮开始左右摆动。
2.延迟与放大:在一定的高速下,由于轮胎的弹性、车架的形变等因素,自回正力矩的产生会“慢半拍”。当前轮已经摆向左侧时,延迟到来的回正力矩才试图将其拉回,但此时合力可能过大,导致前轮“矫枉过正”地甩向右侧。
3.恶性循环:这个延迟的力矩,不仅没有抑制摆动,反而在错误的时间给摆动“加了一把劲”,变成了驱动摆动的周期性驱动力矩。此时,系统从正阻尼(消耗摆动能量)变为“负阻尼”(从车辆前行中汲取能量,输入给摆动)。
4.共振爆发:如果这个驱动力矩的频率,恰好与车辆前叉系统的固有振动频率接近,就会引发共振。能量持续输入,摆动幅度在正反馈循环中指数级放大,在几秒内就从轻微颤动变为剧烈狂摆。
这就像每推一次秋千,都精准地推在它自然摆动的节奏上,导致振幅越来越大,形成自激振荡的正反馈循环。
3
临界速度与影响因素
触发摆振的速度阈值无法通过简单的数学关系去计算,它取决于一个复杂的函数,前叉角和拖曳距的影响最为显著。增加拖曳距(更稳定的几何)会提高临界速度,但会牺牲转向灵活性;减小拖曳距(更敏捷)则降低稳定性阈值。这就是摩托车设计的根本权衡。
4
拯救:中断能量的博弈
当车把突然开始高频(通常3-5 赫兹)、大角度(很快达到±20 度以上)地自主左右狂摆,手臂感受到巨大的、交替的冲击力,峰值可达数百牛顿。这是一种强烈的“被操控感”,仿佛车辆有了自己的意志。此时,车手经过多年训练形成的肌肉记忆完全失效:死握车把的本能反应恰恰向已处于共振边缘的转向系统注入了更多能量,加速了系统的崩溃,俗称增加了“人机耦合”。研究发现,未经训练的车手会使振荡能量增加50%以上。
5
正确的物理直觉:从对抗到融入
基于对系统动力学的深刻理解,正确的应对策略是反直觉的:
·放松手臂:这不是放弃,而是战略撤退。减少能量输入,允许系统依靠自身的结构阻尼(如果还有的话)消耗振荡能量。理想状态是手臂保持接触但不施加主动力矩。
·重心后移/趴低:改变整车质量分布,轻微调整前后轮载荷(后移重心可减少前轮载荷约 10-15%),从而改变系统的振动特性,提高有效拖曳距。
·平稳加速(如可能):提高车速有时能使系统脱离共振速度区间,但需要极大勇气和精确判断。
这些动作的本质,是让车手从一个试图对抗系统的“外部干扰源”,转变为调整系统参数的“内在调节器”。
当然,现代摩托车科技也引入了装在车把上的转向阻尼器(钛尺),来解决死亡摇摆问题。当摩托车在高速下出现死亡摇摆时,车把试图剧烈、高速地左右狂甩,此时钛尺中的油液会因为特殊的设计立刻会产生巨大的液压阻力,像一把液压钳一样,死死“握住”车把,把疯狂摆动的能量转化成热量消耗掉。

摩托车的转向阻尼器丨图库版权图片,转载使用可能引发版权纠纷
说白了,骑摩托车就是一门"活着"的物理课。
从压弯到救车,车手其实在玩两种完全不同的游戏:一个是利用平衡,一个是对抗混乱。
所以你看,摩托车手每天在赛道上干的,就是在这两种状态之间疯狂切换:进弯时,他们像物理学家一样精确计算;出弯加速时,又像工程师一样随时准备按下"稳定按钮"。
这不是什么高高在上的"史诗",这就是最纯粹的速度游戏——既要懂公式,又要有胆量;既要感受物理,又要战胜物理。
参考文献
[1] P.A.J. Ruijs, H.B. Pacejka, RECENT RESEARCH IN LATERAL DYNAMICS OF MOTORCYCLES
[2]Evangelou, S. A., Limebeer, D. J. N. & Tomas-Rodriguez, M. (2013). Suppression of Burst Oscillations in Racing Motorcycles. Journal Of Applied Mechanics, 80(1), pp. 5578-5585. doi: 10.1115/1.4006491
策划制作
来源丨中国科学院物理所(id:cas-iop)
作者丨史小凡 中国科学院大学博士研究生
蜀商证券提示:文章来自网络,不代表本站观点。



